Inducing Motion
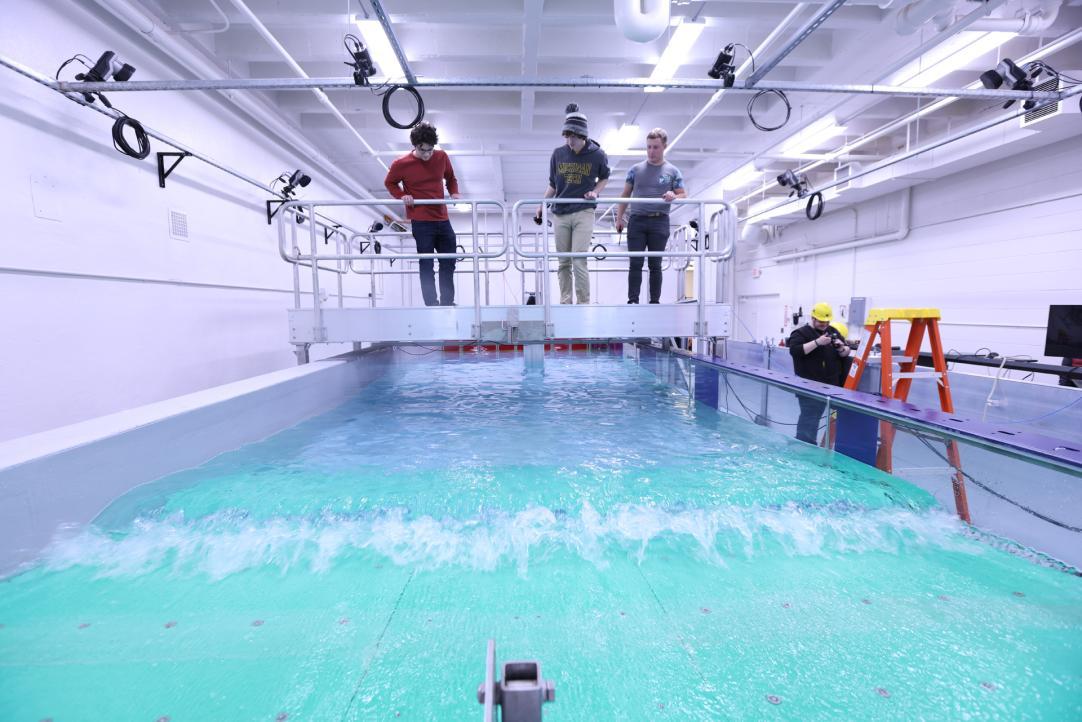
MTU Wave features a 10 m x 3m x 1m Edinburgh Designs wave tank with eight independently controlled paddles with position and force feedback to generate desired wave fields propagating towards an adjustable 3m long curved high-density, polyethylene, energy-adsorbing beach.
- Glass wall for observation and imaging of underwater experiments.
- Max Wave Height = 0.25 m, Wave Bandwidth = 0.3 - 1.3 Hz (0.8 - 3.3 second period).
- Time-synchronized instrumentation, including an 11 camera, Qualisys motion tracker, wave gauges, a dSPACE MicroLabBox for data acquisition and control system implementation.
- Buoy dynamometer for applying motion while measuring forces on submerged bodies.
- Overhead-mounted, 6-axis Universal Robots UR10e for force or position manipulation of objects in the wave tank.
- Overhead walkway for easy access to the wave tank and for mounting of test equipment.
- Frictionless PTO WEC control testbed.
- MTU Wave was designed with wave energy converter (WEC) technology in mind.
- Research topics include control algorithm development, fundamental hydrodynamic phenomena, validation of numerical models, and wave force machine learning strategies.
- Large motion WECs, whose models require nonlinear terms exploitable by the control system, are of particular interest.
- Validation of a CFD model of MTU Wave for fundamental hydrodynamic studies, such as the damping behavior of porous structures.
- Testing mini-thruster technologies is another area where MTU Wave is well-suited

Resistive type wave gauges to measure accurate wave elevation.

Infrared Camera of Qualisys Motion Tracking System
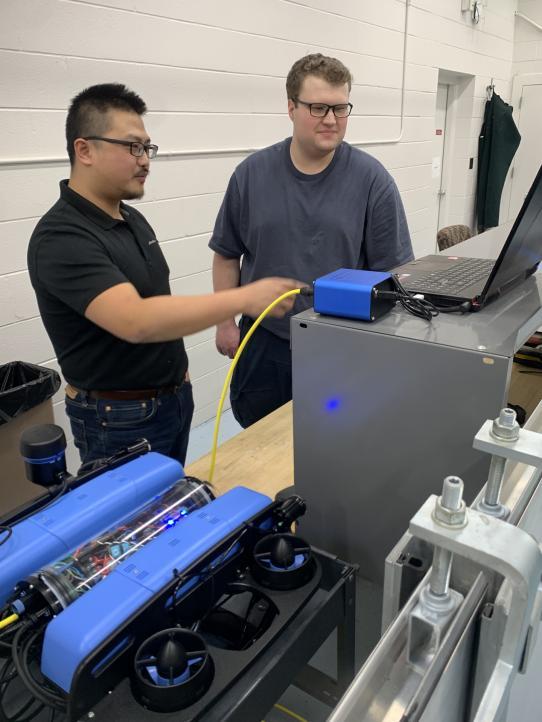
Dr. Shangyan Zou with PhD student planning the underwater robot test.
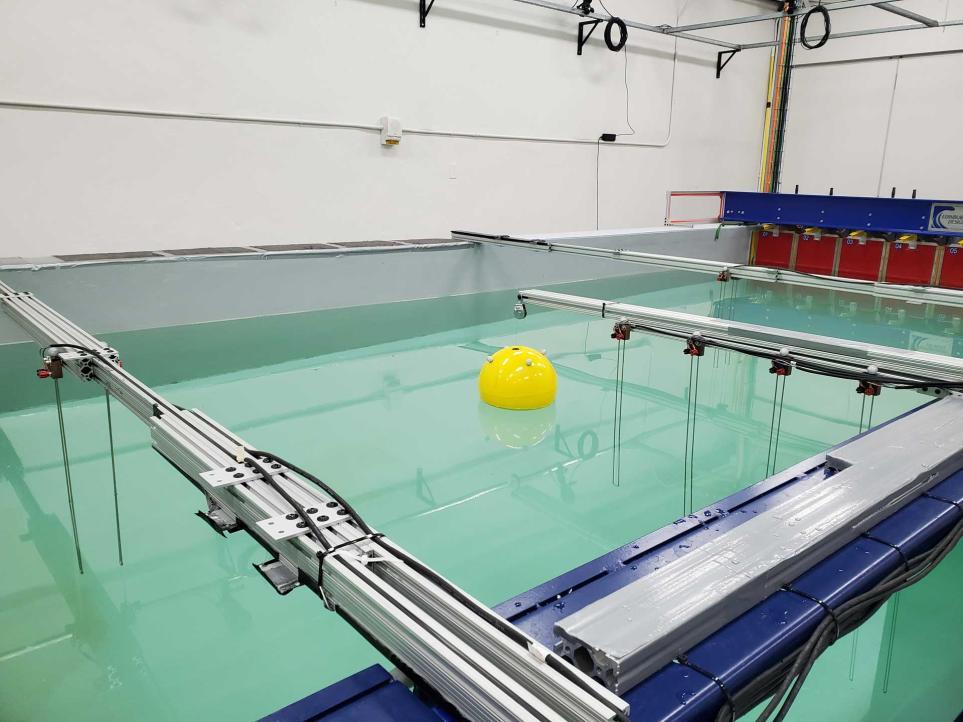
Free decay point absorber WEC test setup.
Parabolic energy-adsorbing beach.

Custom wave profile design in Njord Wave Synthesis
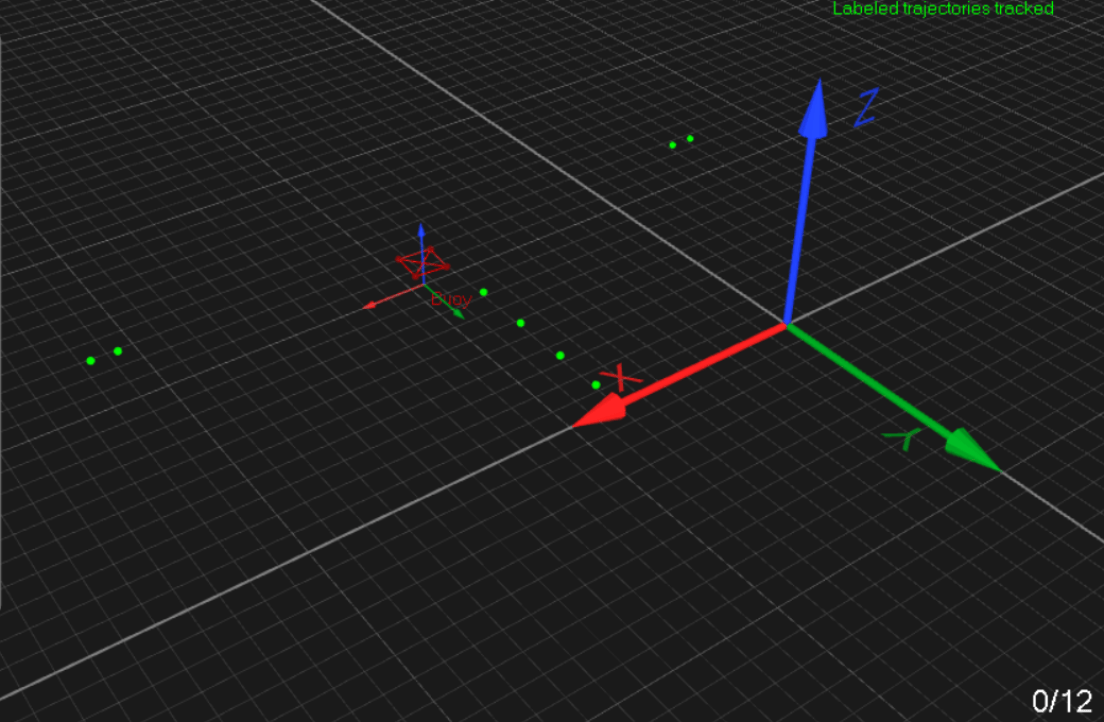
Qualisys Motion Tracking System – Body definitions and wave gauges locations.
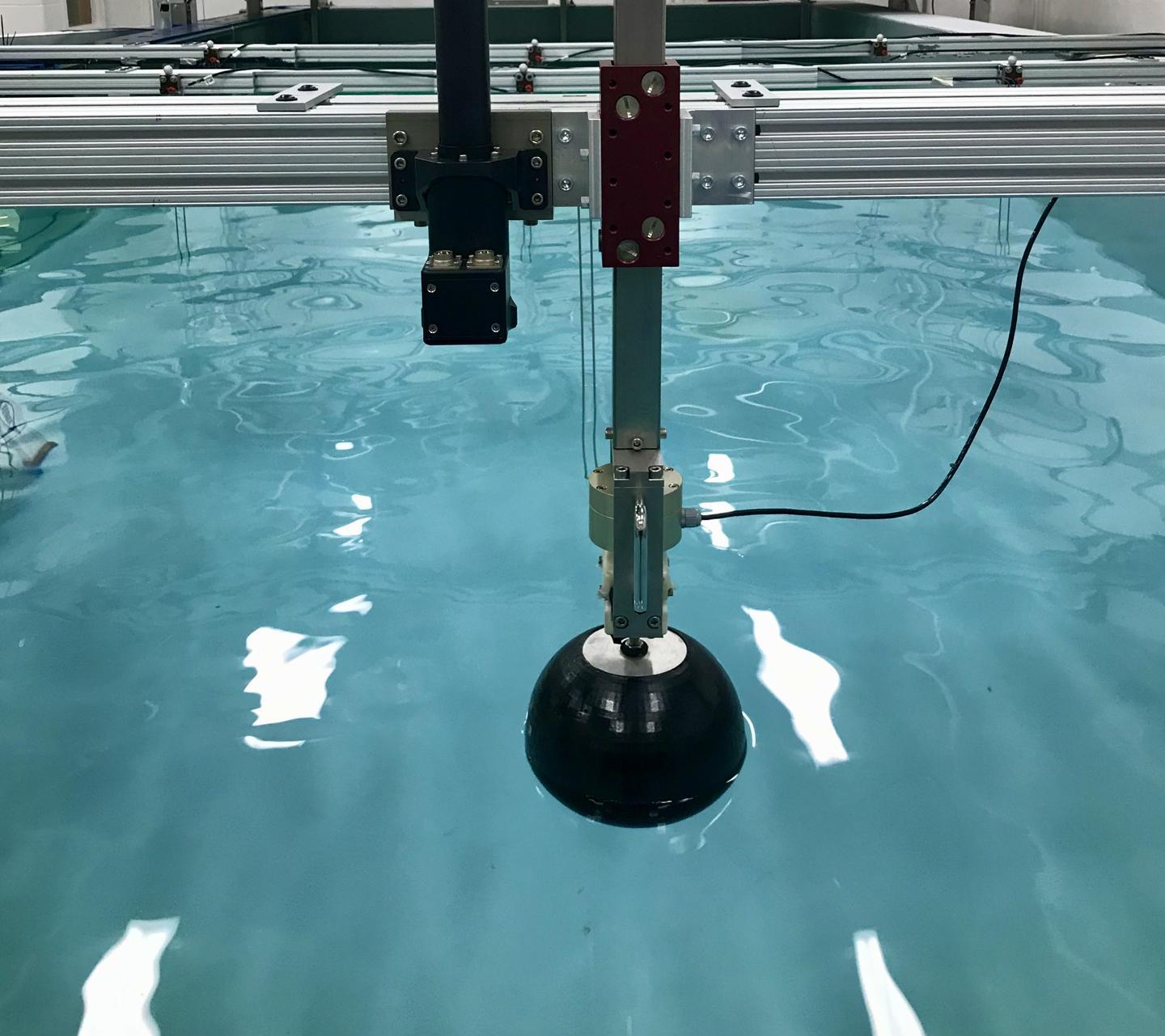
Buoy Dynamometer
- Speed or force-controlled linear actuator, Stroke: 200mm, Max Speed: 25.4 mm/s
- Modular, water-proof load cell, Max. Force: 222N
Underwater Data/Power Transmitter
- Voltage: 24
- Max Power: 50 W
Software
- WAMIT
- MATLAB / Simulink / Simscape (95 toolboxes)
- dSPACE Control Desk
- WEC-Sim
- Wolfram System Modeler
- Njord Wave Synthesis (wave field synthesis)

Wave Tank Instrumentation & Software
- Dimensions (length, width, height): 10m x 3m x 1m
- Maximum wave height: 0.25 m
- Wave period range: 0.8 to 3.3 seconds
- Overhead access and walkway
- Custom wave field creation/analysis software
- Glass wall for underwater observation and imaging
- 11-camera Qualisys motion capture system
- 16 wave gauges
- dSPACE MicroLabBox (32 analogs in, 16 analog out, 48 digital I/O, two CAN, two serial, and one Gigabit ethernet)
- Data collection across all systems is time-synchronized
- Validated CFD model of the tank and the motion of any objects placed in it
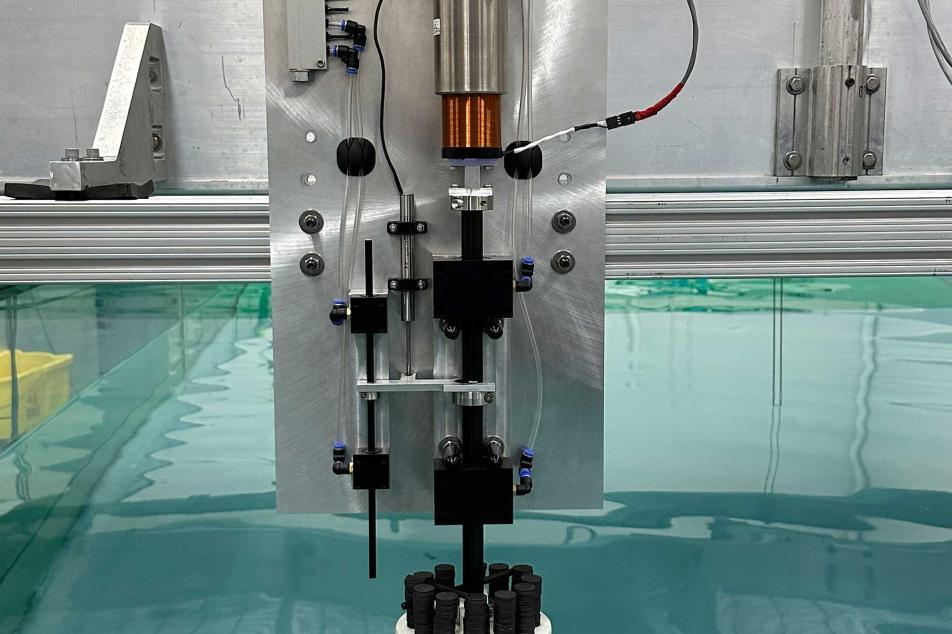
Low-Friction Testbed
Our wave tank offers a Low-Friction Testbed for Model Scale Wave Energy Converter Control System Studies.
- Frictionless air bearings
- Controllable voice coil actuator (dSPACE), Stroke: 85 mm, max Force: 150N
- Non-contact LVIT position sensor, and load cell
- Easily changeable buoy attachment system.
- Time-Synchronized to the rest of MTU wave’s instrumentation - wave gauges, paddle commands,and motion tracking

The facility has ready access to several plastic 3D printers (VAT polymerization, material jetting, and Fused Deposition Modeling), a newly commissioned 3D Systems DMP Flex 350 metal printer, and a complete machine shop for buoy and fixture fabrication.